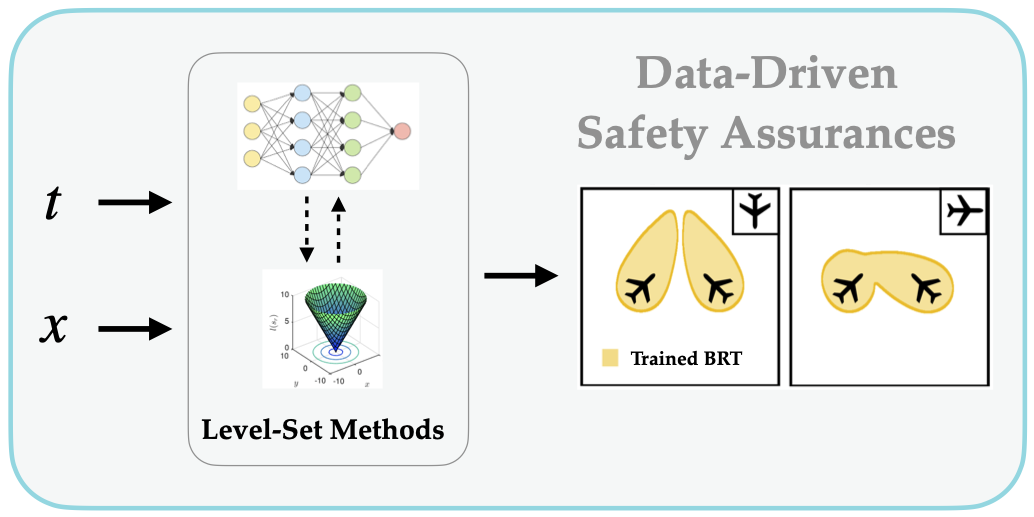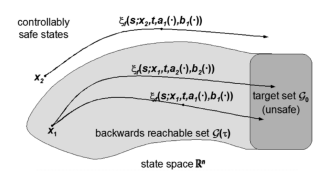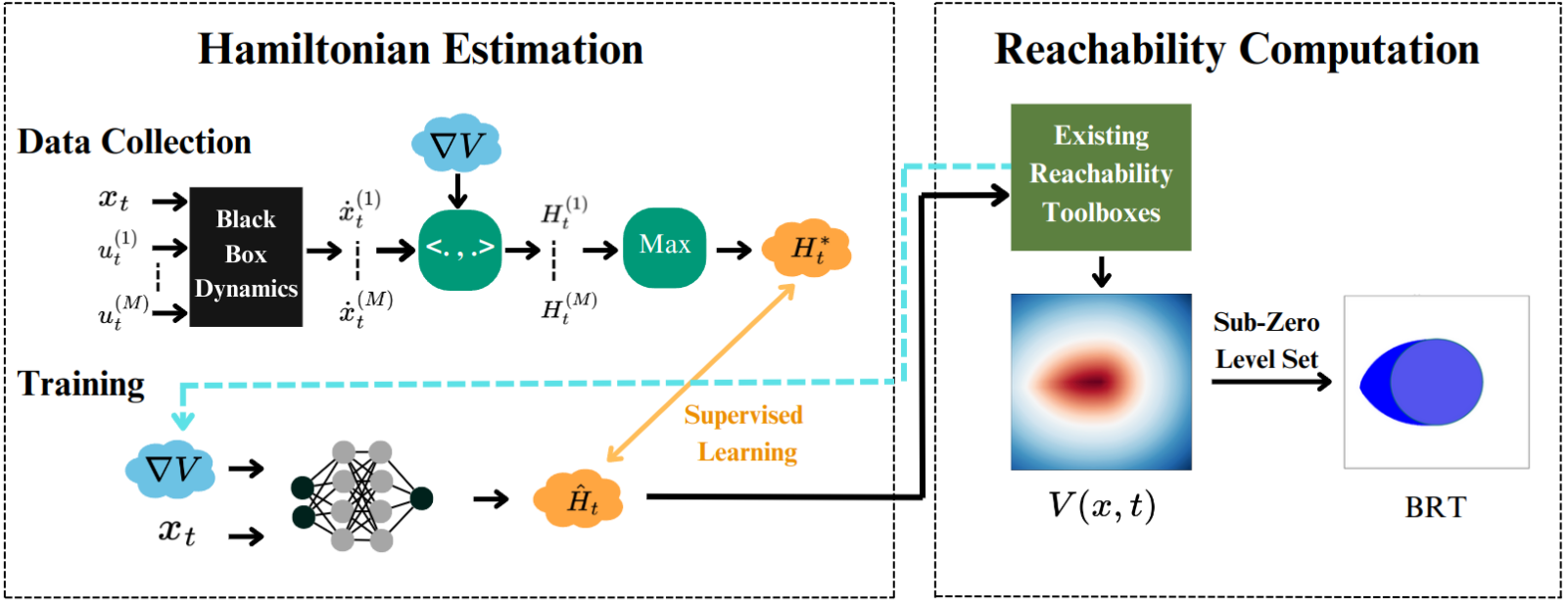
Hamilton-Jacobi (HJ) reachability analysis is a powerful framework for ensuring safety and performance in autonomous systems. However, existing methods typically rely on a white-box dynamics model of the system, limiting their applicability in many practical robotics scenarios where only a black-box model of the system is available. In this work, we propose a novel reachability method to compute reachable sets and safe controllers for black-box dynamical systems. Our approach efficiently approximates the Hamiltonian function using samples from the black-box dynamics. This Hamiltonian is then used to solve the HJ Partial Differential Equation (PDE), providing the reachable set of the system. The proposed method can be applied to general nonlinear systems and can be seamlessly integrated with existing reachability toolboxes for white-box systems to extend their use to black-box systems.
[Paper] [Code]