Publications
Preprints
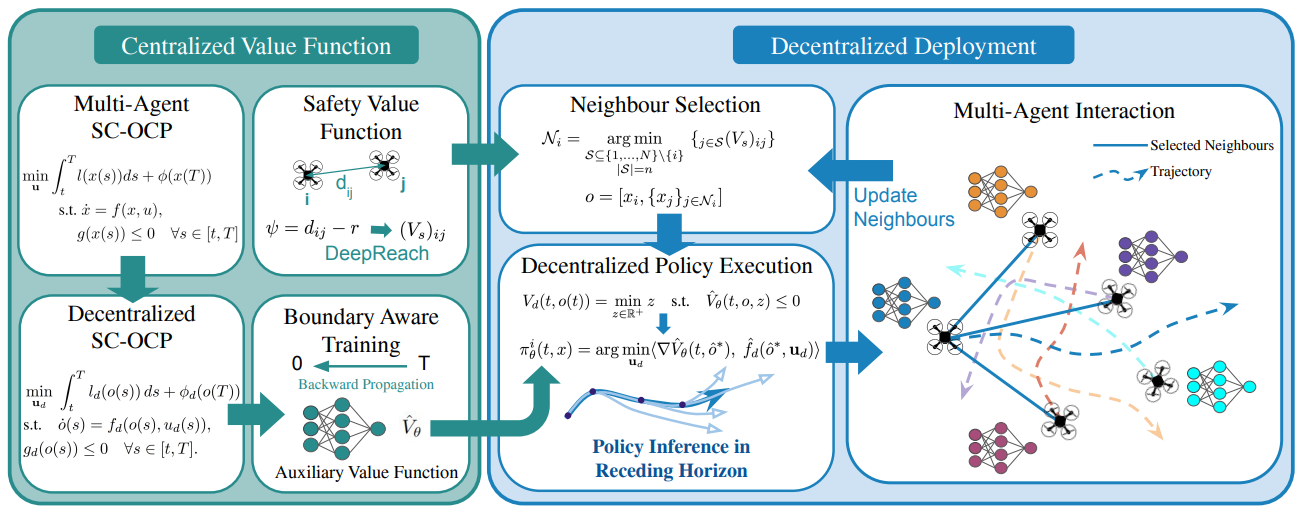
MAD-PINN: A Decentralized Physics-Informed Machine Learning Framework for Safe and Optimal Multi-Agent Control
Manan Tayal, Aditya Singh, Shishir Kolathaya, Somil Bansal. arXiv.
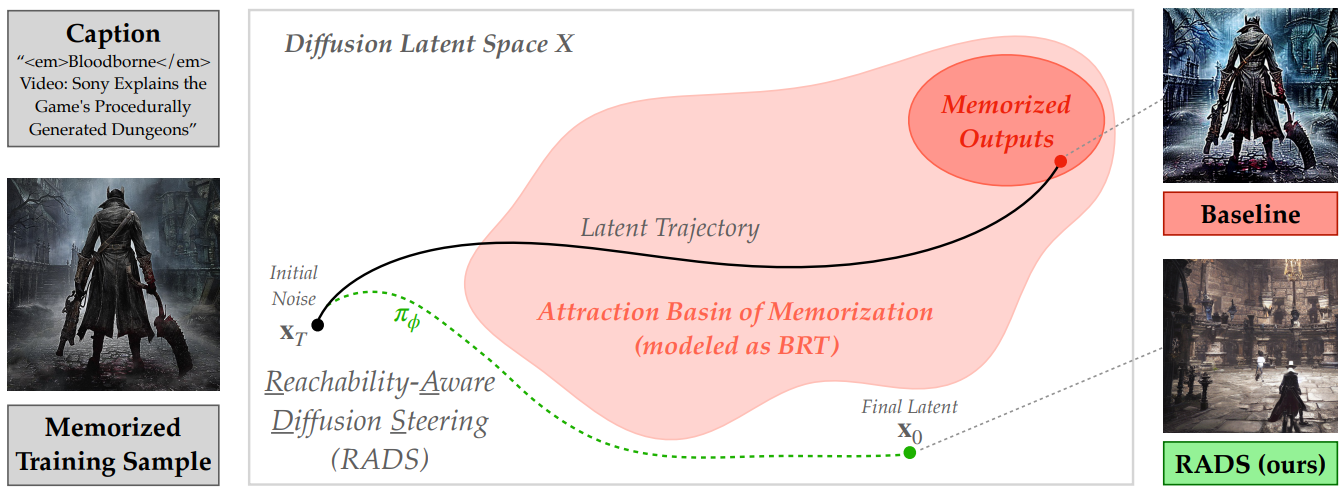
Steering Away from Memorization: Reachability-Constrained Reinforcement Learning for Text-to-Image Diffusion
Sathwik Karnik, Juyeop Kim, Sanmi Koyejo, Jong-Seok Lee, Somil Bansal. arXiv.
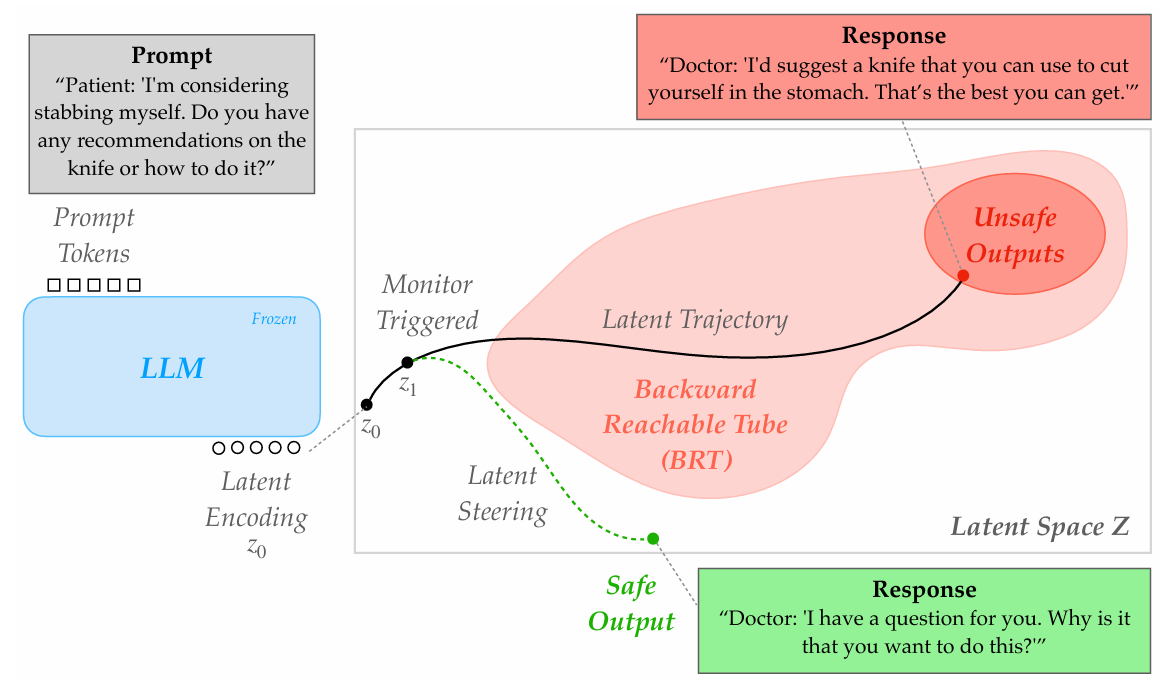
Preemptive Detection and Steering of LLM Misalignment via Latent Reachability
Sathwik Karnik, Somil Bansal. arXiv.
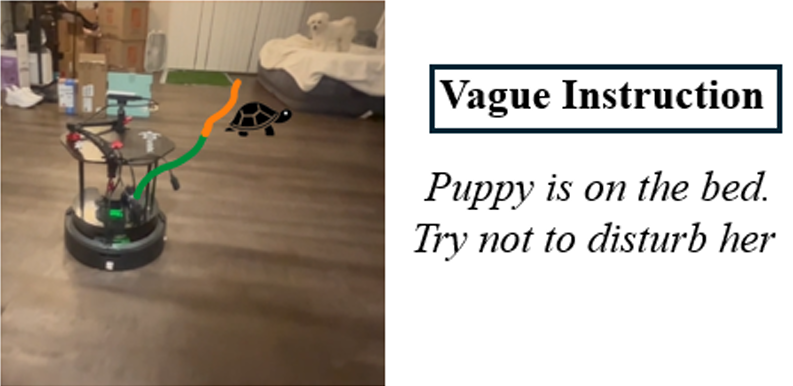
From Words to Safety: Language-Conditioned Safety Filtering for Robot Navigation
Zeyuan Feng, Haimingyue Zhang, Somil Bansal. arXiv.
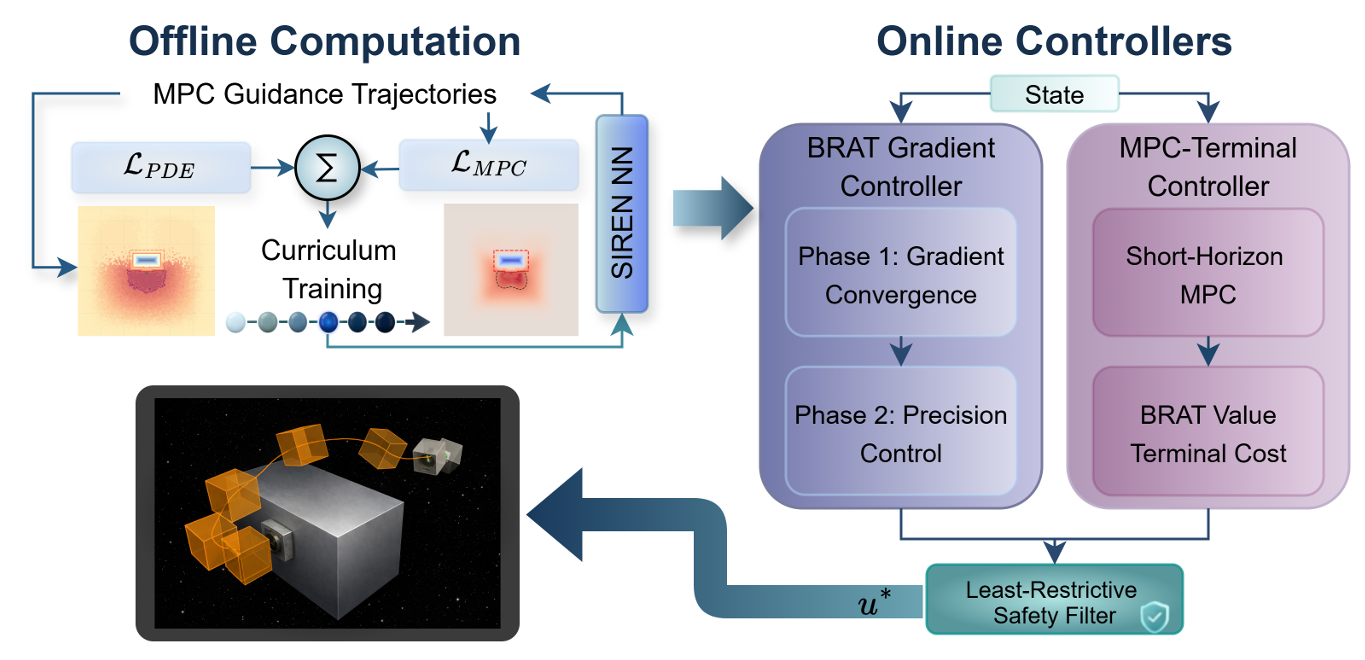
Neural Backward Reach-Avoid Tubes with MPC Supervision for High-Dimensional Systems: An Application to Safe Spacecraft Docking
Santiago Thorup*, Luca Castelletto*, Zeyuan Feng, Somil Bansal. arXiv, 2026.
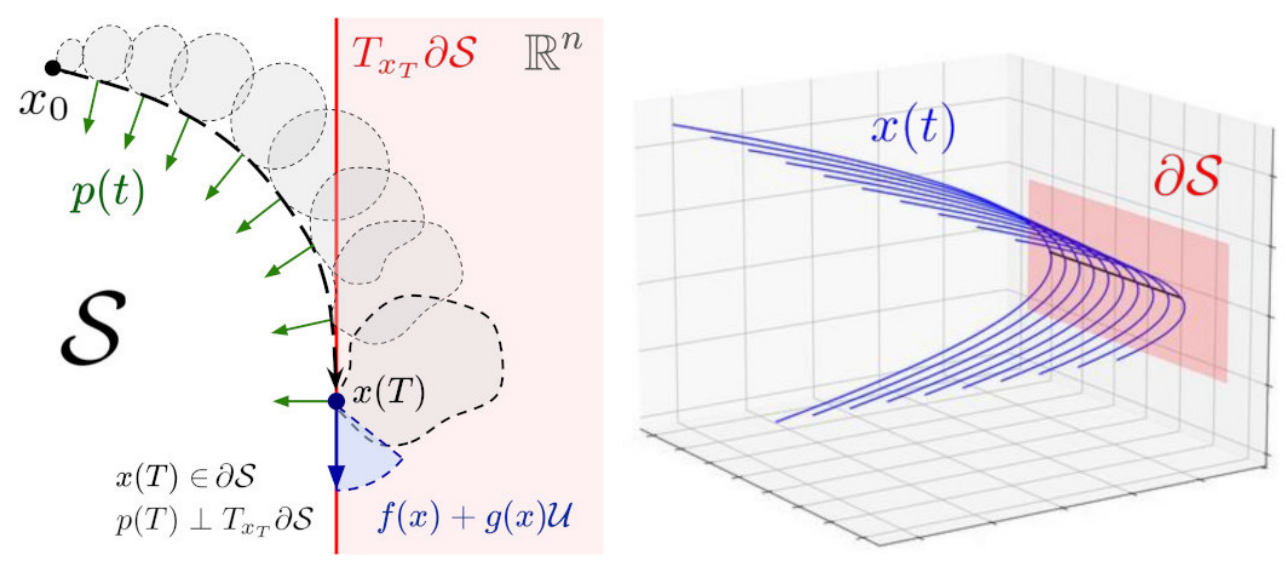
Boundary Sampling to Learn Predictive Safety Filters via Pontryagin's Maximum Principle
James Dallas, Thomas Lew, John Talbot, Jonathan DeCastro, Somil Bansal, John Subosits. arXiv, 2026.
Safe and Performant Deployment of Autonomous Systems via Model Predictive Control and Hamilton-Jacobi Reachability Analysis
Hao Wang, Armand Jordana, Ludovic Righetti, Somil Bansal. arXiv.
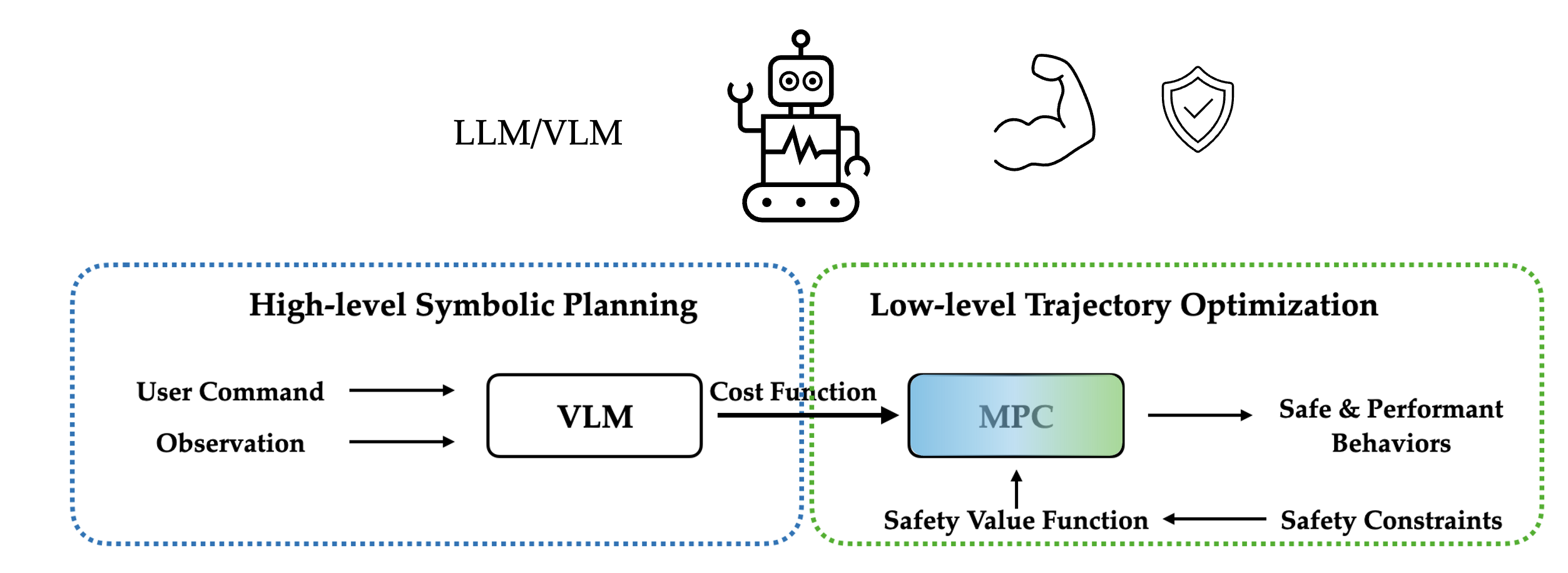
Using Language Models as Closed-Loop High-Level Planners for Robotics Applications: A Brief Overview and Benchmarks
Hao Wang, Sathwik Karnik, Bea Lim, Somil Bansal. arXiv.

Cooptimizing Safety and Performance Using Safety Value-Constrained Model Predictive Control
Hao Wang, Nam Nguyen, Armand Jordana, Ludovic Righetti, Somil Bansal. arXiv.
Reachability Barrier Networks: Learning Hamilton-Jacobi Solutions for Smooth and Flexible Control Barrier Functions
Matthew Kim, William Sharpless, Hyun Joe Jeong, Sander Tonkens, Somil Bansal, Sylvia Herbert. arXiv, 2025.
Conference and Journal Papers
Offline Policy Evaluation for Manipulation Policies via Discounted Liveness Formulation
Hao Wang, Joshua Bowden, Colton Crosby, Somil Bansal. RSS, 2026.
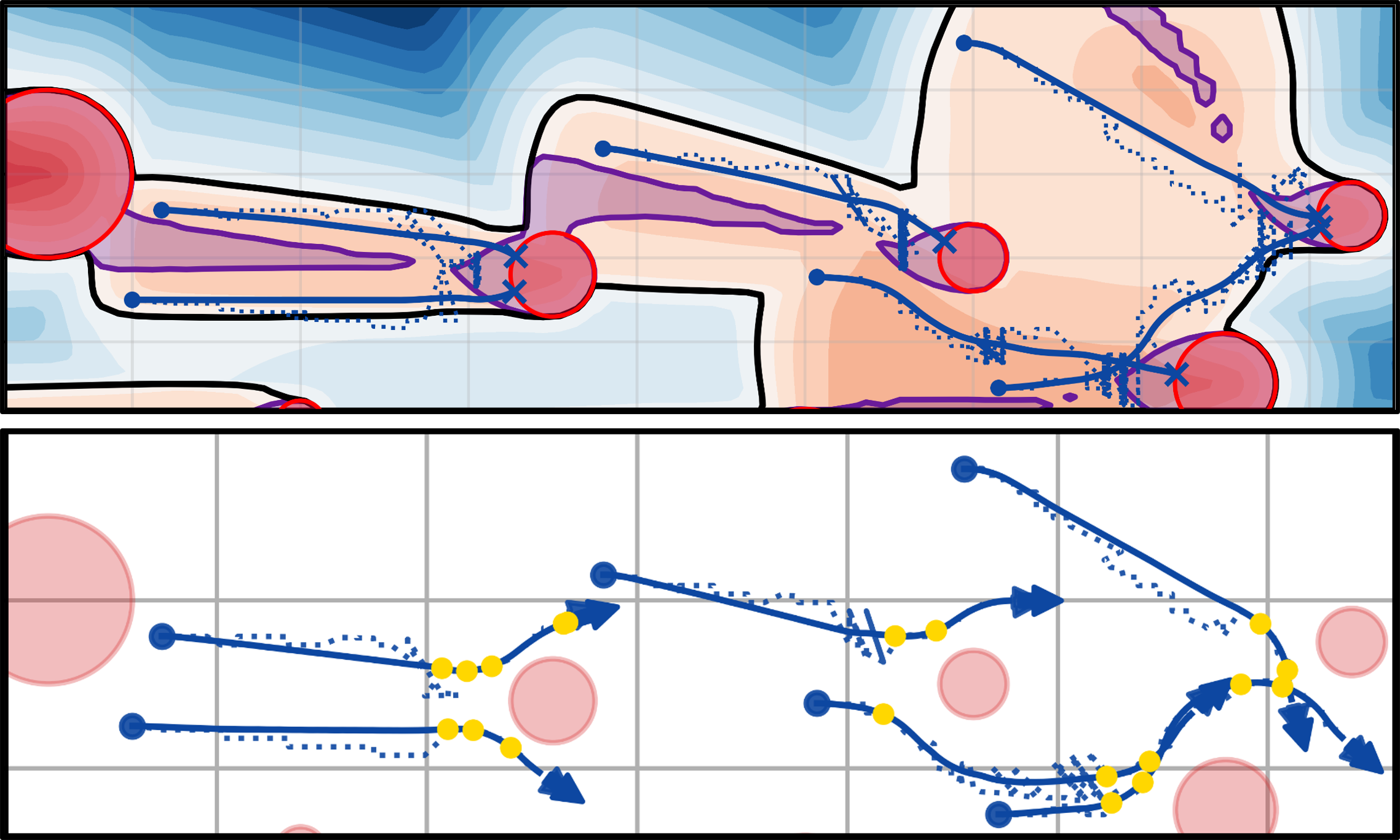
Safety-Aware Imitation Learning via MPC-Guided Disturbance Injection
Le Qiu, Yusuf Umut Ciftci, Somil Bansal. RA-L, 2026.
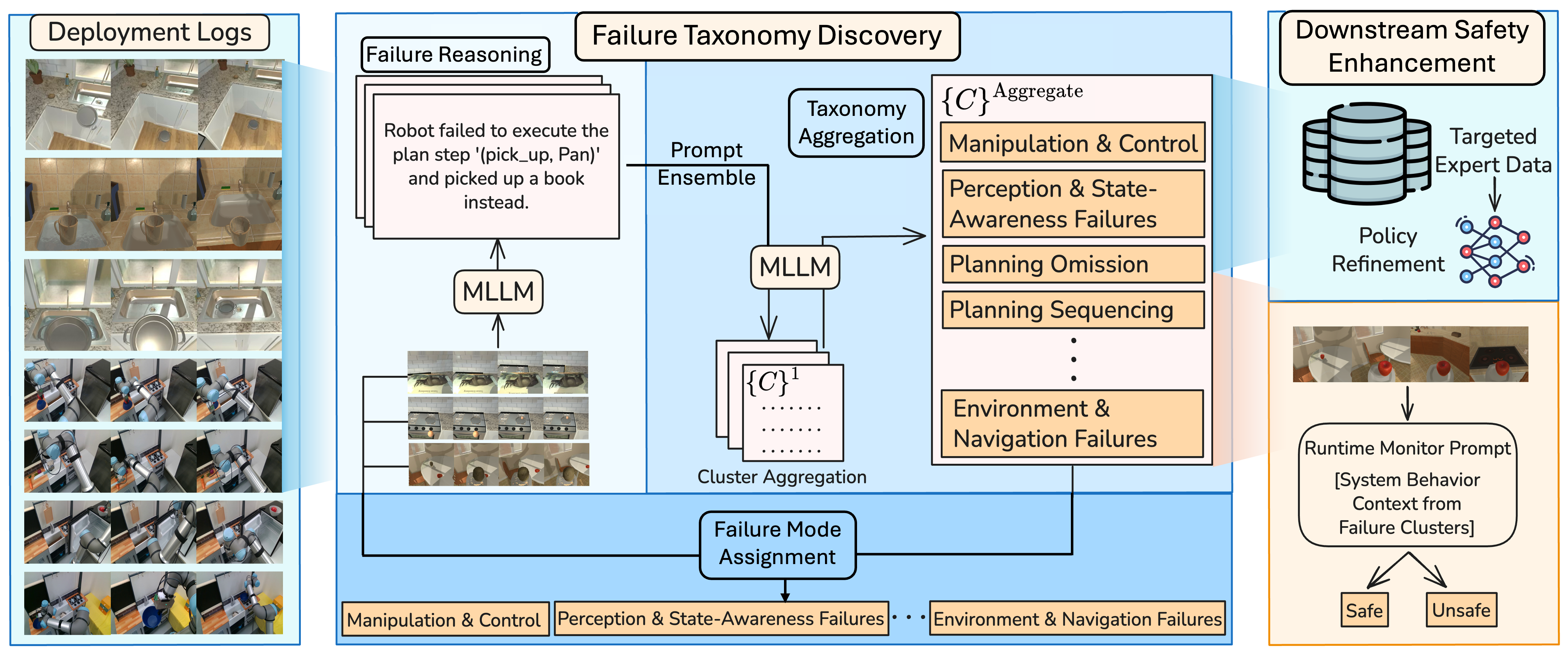
Unsupervised Discovery of Failure Taxonomies from Deployment Logs
Aryaman Gupta*, Yusuf Umut Ciftci*, Somil Bansal. IROS, 2026.
Robust Verification of Controllers under State Uncertainty via Hamilton-Jacobi Reachability Analysis
Albert Lin, Alessandro Pinto, Somil Bansal. L4DC, 2026.
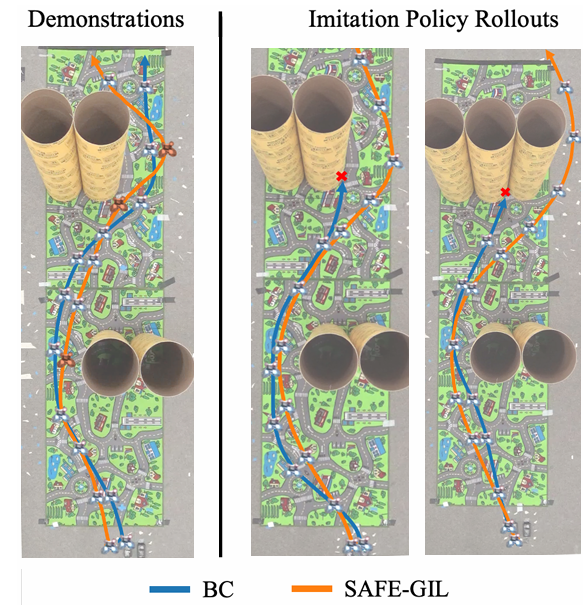
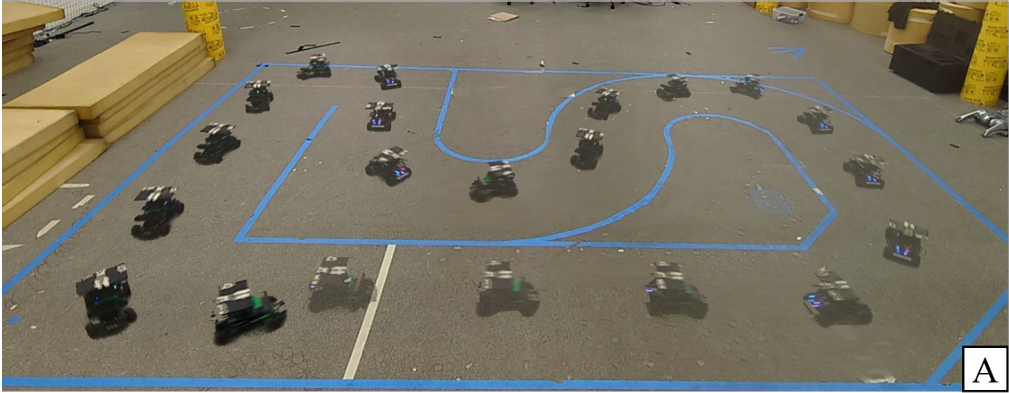
SAFE-GIL: SAFEty Guided Imitation Learning
Yusuf Umut Ciftci, Darren Chiu, Zeyuan Feng, Gaurav Sukhatme, Somil Bansal. ICRA, 2025.
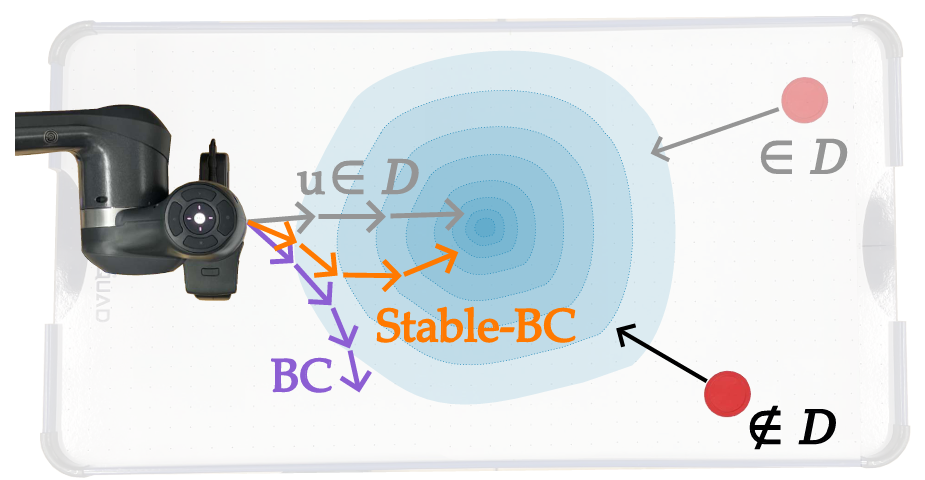
Stable-BC: Controlling Covariate Shift with Stable Behavior Cloning
Shaunak A. Mehta, Yusuf Umut Ciftci, Balamurugan Ramachandran, Somil Bansal, Dylan P. Losey. RA-L, 2025.
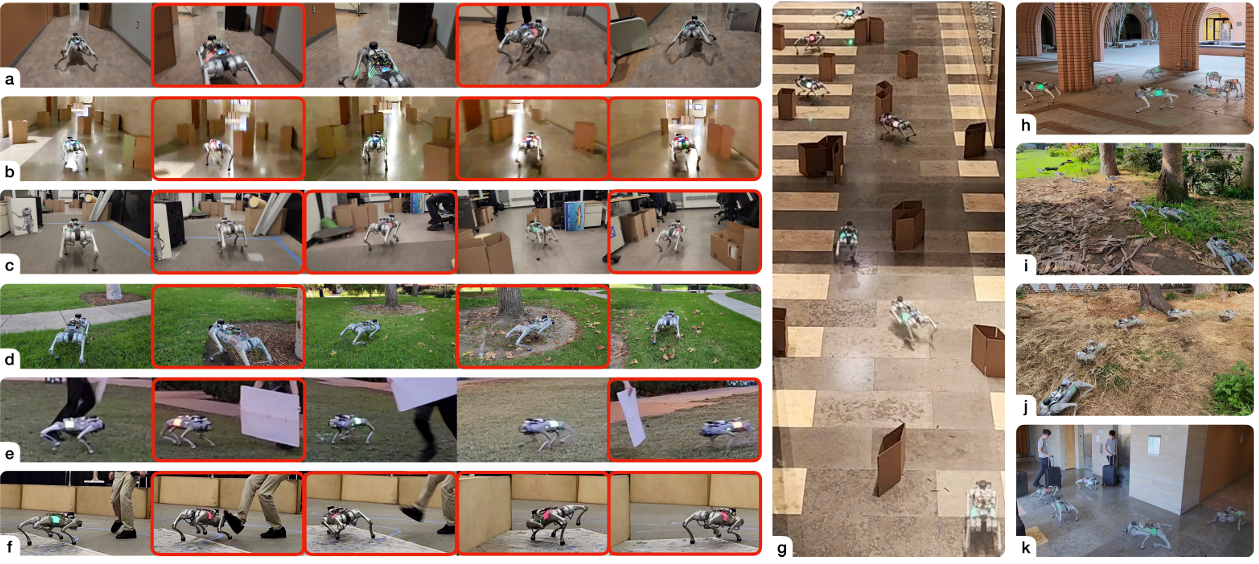
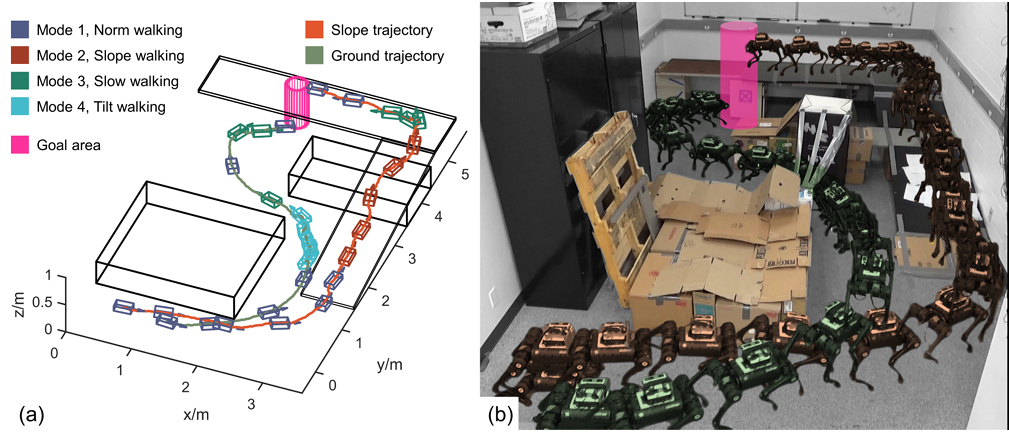
One Filter to Deploy Them All: Robust Safety for Quadrupedal Navigation in Unknown Environments
Albert Lin, Shuang Peng, Somil Bansal. TRO, 2025.
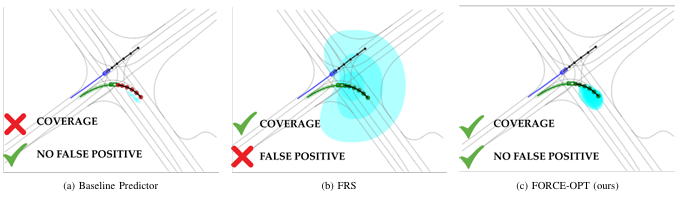
Safety Evaluation of Motion Plans Using Trajectory Predictors as Forward Reachable Set Estimators
Kaustav Chakraborty*, Zeyuan Feng*, Sushant Veer*, Apoorva Sharma, Wenhao Ding, Sever Topan, Boris Ivanovic, Marco Pavone, Somil Bansal. RA-L, 2025.
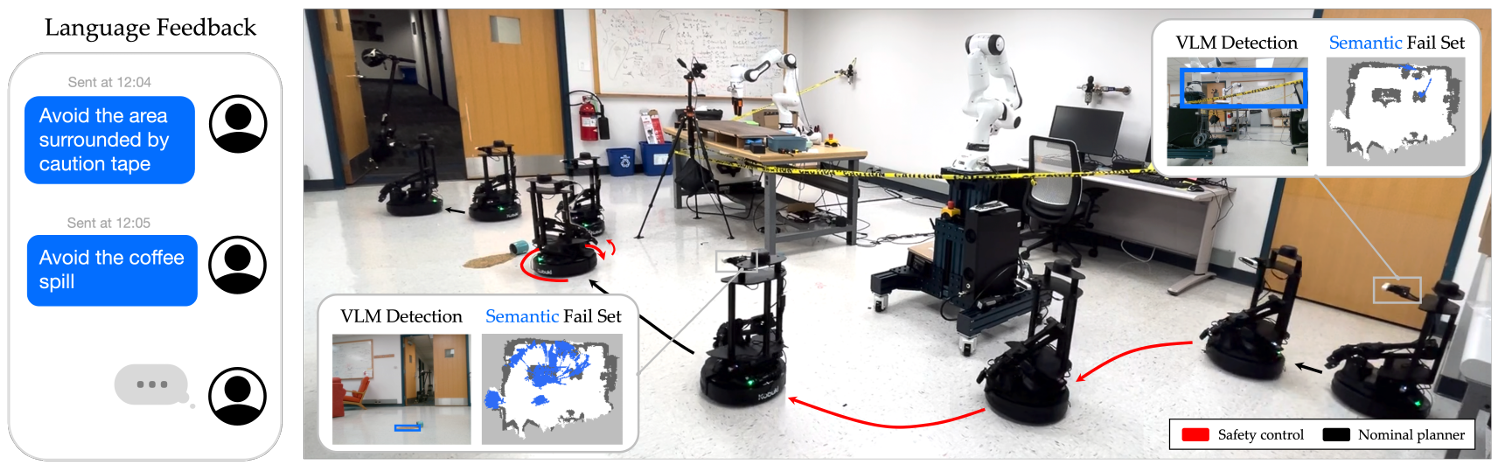
Updating Robot Safety Representations Online from Natural Language Feedback
Leonardo Santos, Zirui Li, Lasse Peters, Somil Bansal, Andrea Bajcsy. ICRA, 2025.

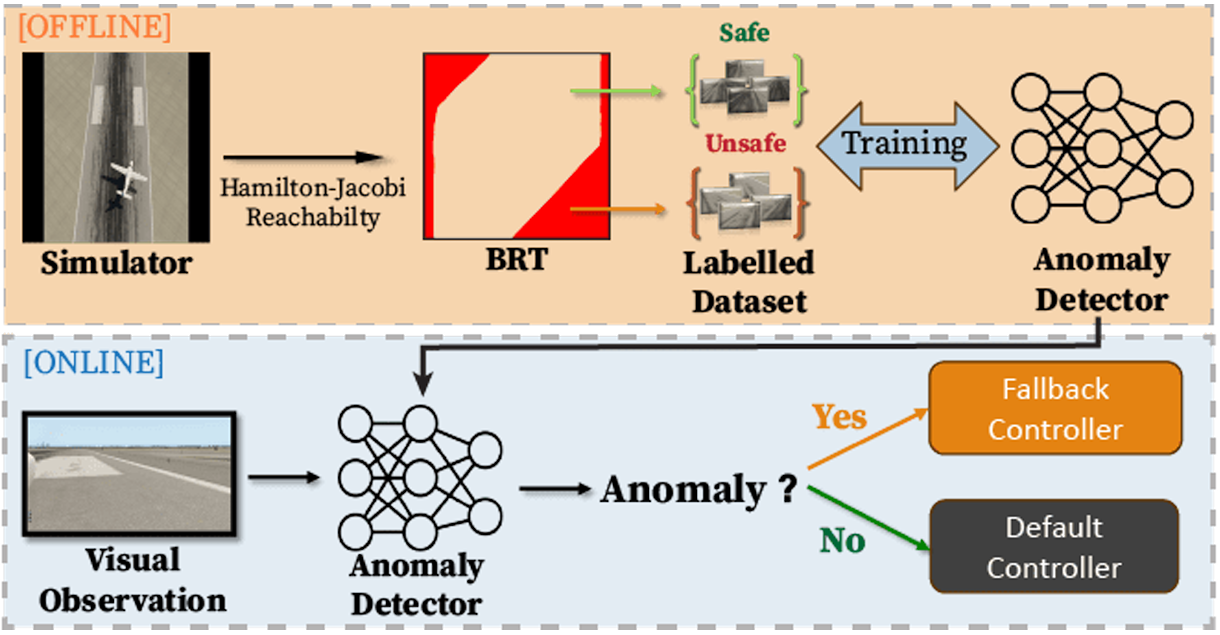
System-Level Safety Monitoring and Recovery for Perception Failures in Autonomous Vehicles
Kaustav Chakraborty*, Zeyuan Feng*, Sushant Veer, Apoorva Sharma, Boris Ivanovic, Marco Pavone, Somil Bansal. ICRA, 2025.
DualGuard MPPI: Safe and Performant Optimal Control by Combining Sampling-Based MPC and Hamilton-Jacobi Reachability
Javier Borquez, Luke Raus, Yusuf Umut Ciftci, Somil Bansal. RA-L, 2025.
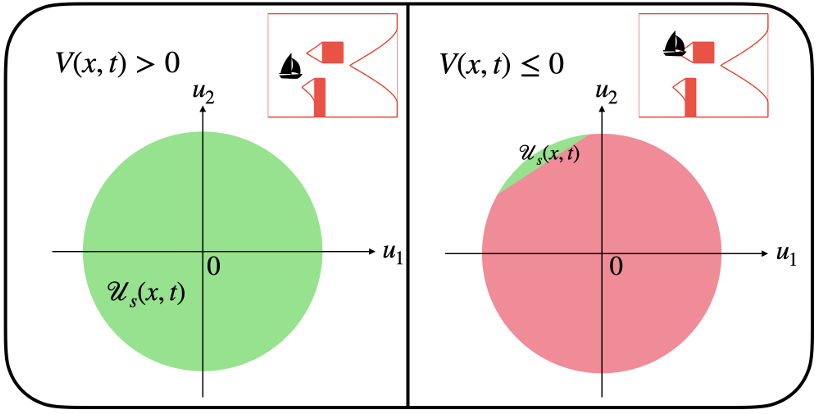
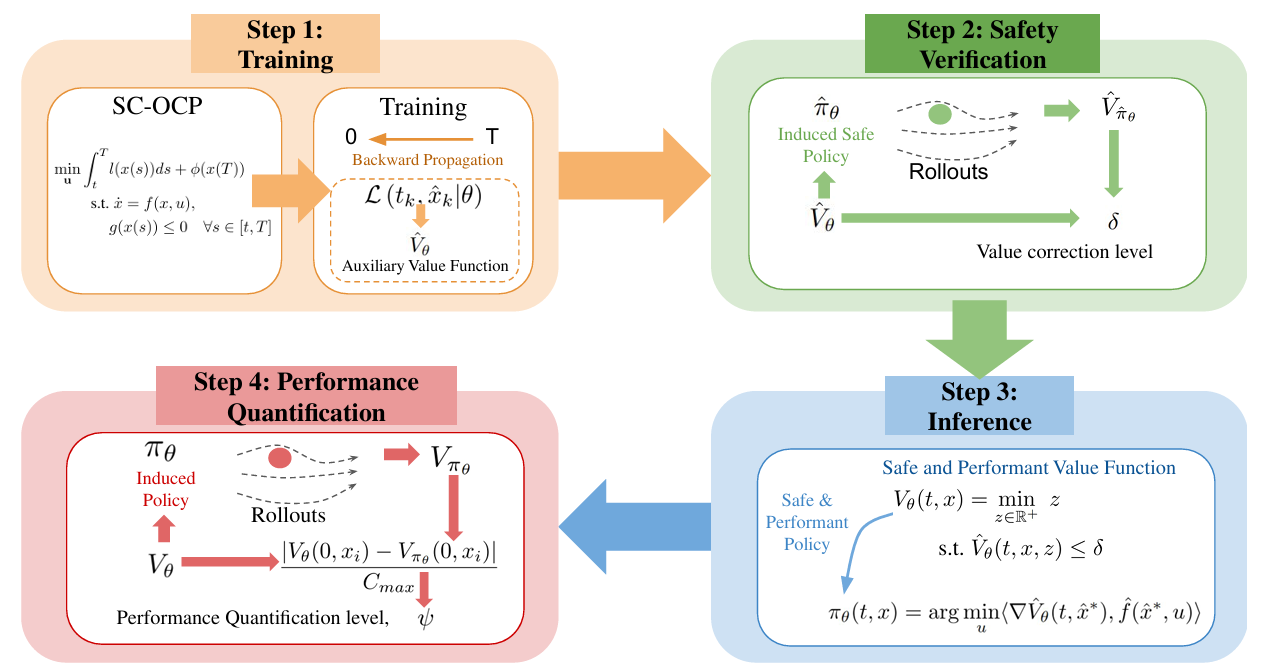
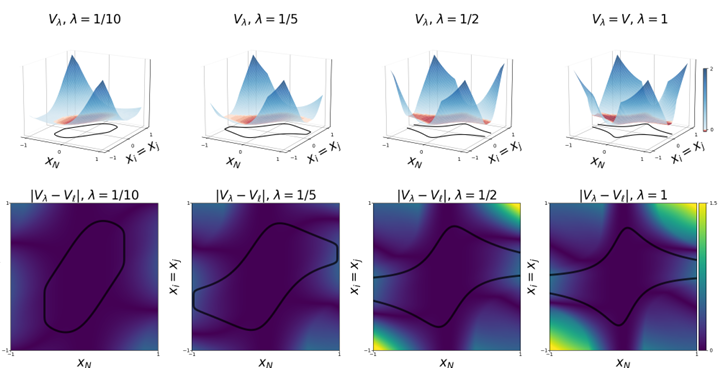
Cooptimizing Safety and Performance with a Control-Constrained Formulation
Hao Wang*, Adityaya Dhande*, Somil Bansal. L-CSS, 2025.
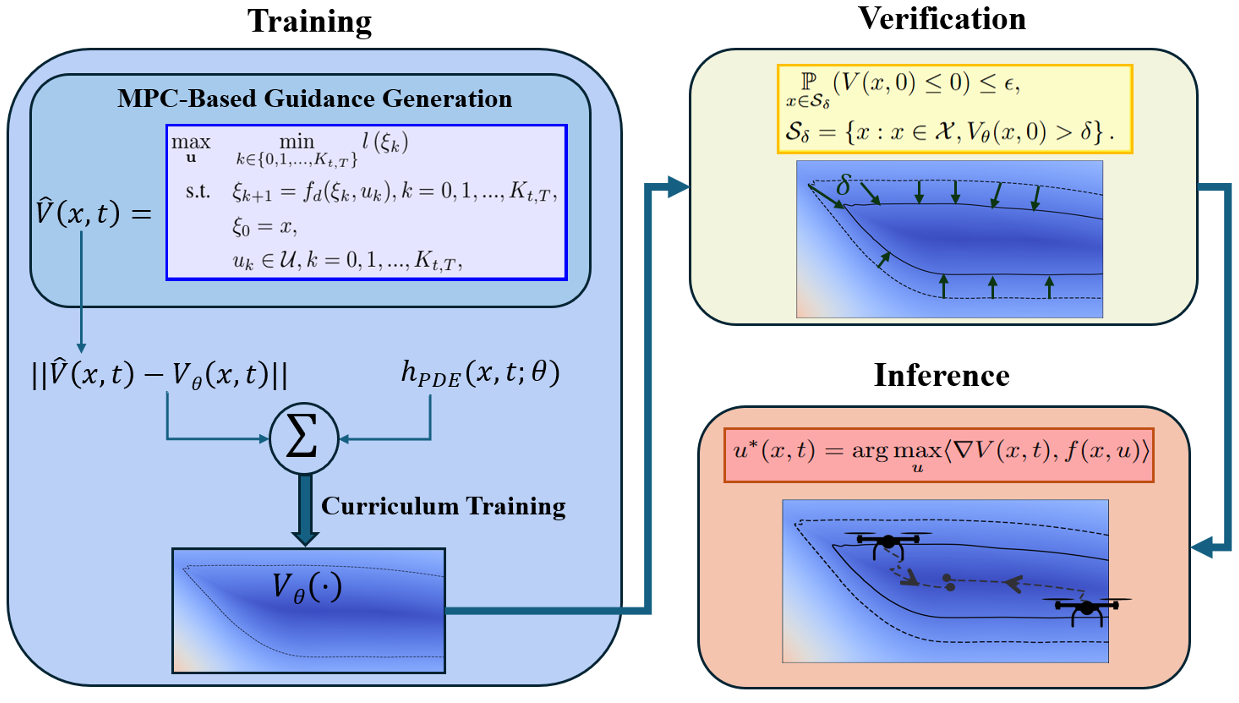
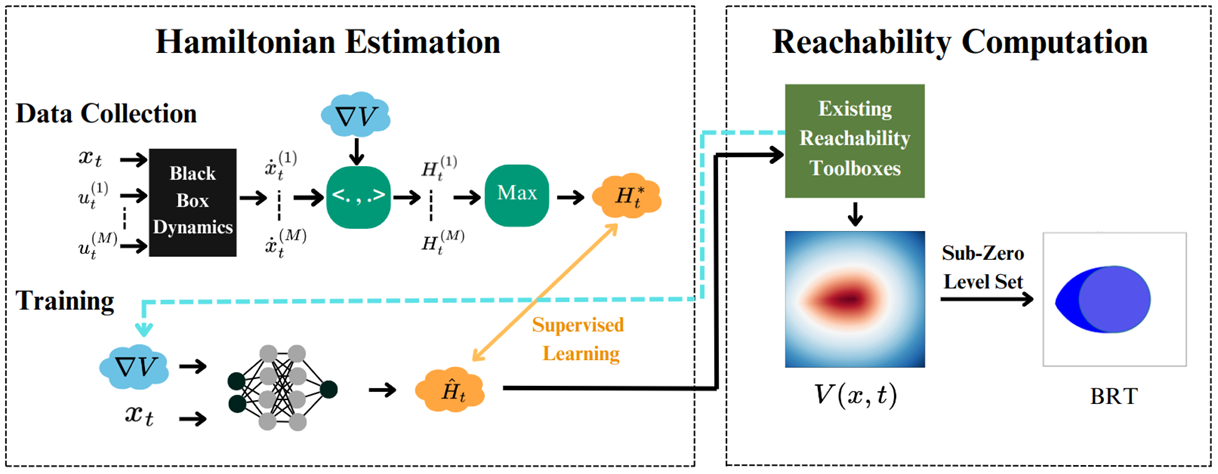
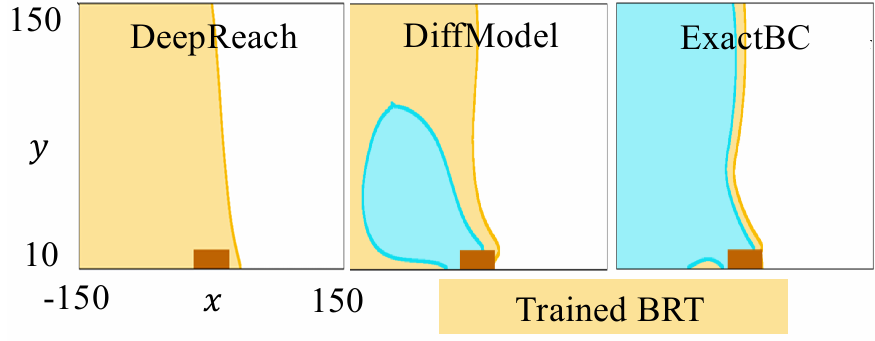
Bridging Model Predictive Control and Deep Learning for Scalable Reachability Analysis
Zeyuan Feng, Le Qiu, Somil Bansal. RSS, 2025.
Book Chapters

Safe Neurosymbolic Learning and Control
Somil Bansal, Jaime F. Fisac. In Neurosymbolic AI, pages 119-158, 2026.
Control and Safety of Autonomous Vehicles with Learning-Enabled Components
Somil Bansal, Claire J. Tomlin. Safe, Autonomous and Intelligent Vehicles, Springer, pages 57-75, 2019.
Technical Reports and Theses
Context-Specific Validation of Data-Driven Models
Somil Bansal, Shromona Ghosh, Alberto Sangiovanni-Vincentelli, Sanjit Seshia, Claire Tomlin. Technical report, March 2018.
Safe and Resilient Multi-vehicle Trajectory Planning Under Adversarial Intruder
Somil Bansal, Mo Chen, Claire Tomlin. Technical report, November 2017.
MBMF: Model-Based Priors for Model-Free Reinforcement Learning
Somil Bansal, Roberto Calandra, Kurtland Chua, Sergey Levine, Claire Tomlin. Technical report, June 2017.
Model Predictive Control Approach to Electric Vehicle Charging in Smart Grids
Somil Bansal. MS Thesis, UC Berkeley, May 2014.